هœ¨و¬§و°ڈه‡ ن½•ç©؛é—´ن¸ï¼Œه¹³é¢و–¹ç¨‹ه°±وک¯ن¸€ن¸ھن¸‰ه…ƒن¸€و¬،و–¹ç¨‹ï¼Œç›´ç؛؟ه°±وک¯ن¸¤ن¸ھéه¹³è،Œه¹³é¢çڑ„ن؛¤ç؛؟,و‰€ن»¥ç›´ç؛؟و–¹ç¨‹ه°±وک¯ن¸¤ن¸ھن¸‰ه…ƒن¸€و¬،و–¹ç¨‹ç»„èپ”ç«‹م€‚ن½†وک¯هœ¨ه¹³é¢è§£وگه‡ ن½•ن¸ï¼Œç›´ç؛؟çڑ„و–¹ç¨‹ه°±ç®€هچ•çڑ„ه¤ڑن؛†م€‚ه¹³é¢ه‡ ن½•ن¸ç›´ç؛؟و–¹ç¨‹وœ‰ه¤ڑç§چه½¢ه¼ڈ,ن¸€èˆ¬ه¼ڈç›´ç؛؟و–¹ç¨‹هڈ¯ç”¨ن؛ژوڈڈè؟°و‰€وœ‰ç›´ç؛؟ï¼ڑ
Ax+By+C = 0 (Aم€پBن¸چهگŒو—¶ن¸؛0)
ه½“çں¥éپ“ç›´ç؛؟ن¸ٹن¸€ç‚¹هگو ‡ï¼ˆX0,Y0)ه’Œç›´ç؛؟çڑ„و–œçژ‡Kهکهœ¨و—¶ï¼Œهڈ¯ن»¥ç”¨ç‚¹و–œه¼ڈو–¹ç¨‹ï¼ڑ
Y-Y0 = K(X – X0) (ه½“Kن¸چهکهœ¨و—¶ï¼Œç›´ç؛؟و–¹ç¨‹ç®€هŒ–وˆگX = X0)
ه½“çں¥éپ“ç›´ç؛؟ن¸ٹçڑ„ن¸¤ن¸ھ点(X0,Y0)ه’Œ(X1,Y1)و—¶ï¼Œè؟کهڈ¯ن»¥ç”¨ن¸¤ç‚¹ه¼ڈو–¹ç¨‹وڈڈè؟°ç›´ç؛؟ï¼ڑ
除ن؛†è؟™ن¸‰ç§چه½¢ه¼ڈçڑ„ç›´ç؛؟و–¹ç¨‹ه¤–,直ç؛؟و–¹ç¨‹è؟کوœ‰وˆھè·ه¼ڈم€پو–œوˆھه¼ڈç‰ه¤ڑç§چه½¢ه¼ڈم€‚
هœ¨و•°ه¦èŒƒç•´ه†…çڑ„ç›´ç؛؟وک¯ç”±و²،وœ‰ه®½ه؛¦çڑ„点组وˆگçڑ„集هگˆï¼Œن½†وک¯هœ¨è®،ç®—وœ؛ه›¾ه½¢ه¦çڑ„范畴ه†…,و‰€وœ‰çڑ„ه›¾ه½¢هŒ…و‹¬ç›´ç؛؟都وک¯è¾“ه‡؛وˆ–وک¾ç¤؛هœ¨ç‚¹éکµè®¾ه¤‡ن¸ٹçڑ„,被وˆگن¸؛点éکµه›¾ه½¢وˆ–ه…‰و …ه›¾ه½¢م€‚ن»¥وک¾ç¤؛ه™¨ن¸؛ن¾‹ï¼Œçژ°ه®ن¸ه¸¸è§پçڑ„وک¾ç¤؛ه™¨ï¼ˆهŒ…و‹¬CRTوک¾ç¤؛ه™¨ه’Œو¶²و™¶وک¾ç¤؛ه™¨ï¼‰éƒ½هڈ¯ن»¥çœ‹وˆگç”±هگ„ç§چ颜色ه’Œçپ°ه؛¦ه€¼çڑ„هƒڈç´ ç‚¹ç»„وˆگçڑ„è±،ç´ çں©éکµï¼Œè؟™ن؛›ç‚¹وک¯وœ‰ه¤§ه°ڈçڑ„,而ن¸”ن½چç½®ه›؛ه®ڑ,ه› و¤هڈھ能è؟‘ن¼¼çڑ„وک¾ç¤؛هگ„ç§چه›¾ه½¢م€‚ه›¾ï¼ˆ1)ه°±وک¯ه¯¹è؟™ç§چوƒ…ه†µçڑ„ن¸€ç§چه¤¸ه¼ çڑ„و”¾ه¤§ï¼ڑ
ه›¾ï¼ˆ1)直ç؛؟هœ¨ç‚¹éکµè®¾ه¤‡ن¸ٹçڑ„è،¨çژ°ه½¢ه¼ڈ
è®،ç®—وœ؛ه›¾ه½¢ه¦ن¸çڑ„ç›´ç؛؟ç”ںوˆگç®—و³•ï¼Œه…¶ه®هŒ…هگ«ن؛†ن¸¤ه±‚و„ڈو€ï¼Œن¸€ه±‚وک¯هœ¨è§£وگه‡ ن½•ç©؛é—´ن¸و ¹وچ®هگو ‡و„é€ ه‡؛ه¹³é¢ç›´ç؛؟,هڈ¦ن¸€ه±‚ه°±وک¯هœ¨ه…‰و …وک¾ç¤؛ه™¨ن¹‹ç±»çڑ„点éکµè®¾ه¤‡ن¸ٹ输ه‡؛ن¸€ن¸ھوœ€é€¼è؟‘ن؛ژه›¾ه½¢çڑ„è±،ç´ ç›´ç؛؟,而è؟™ه°±وک¯ه¸¸è¯´çڑ„ه…‰و …ه›¾ه½¢و‰«وڈڈ转وچ¢م€‚وœ¬و–‡ه°±وک¯ن»‹ç»چه‡ ç§چه¸¸è§پçڑ„ç›´ç؛؟ç”ںوˆگçڑ„ه…‰و …و‰«وڈڈ转وچ¢ç®—و³•ï¼ŒهŒ…و‹¬و•°ه€¼ه¾®هˆ†و³•ï¼ˆDDAو³•ï¼‰م€پBresenhamç®—و³•م€په¯¹ç§°ç›´ç؛؟ç”ںوˆگç®—و³•ن»¥هڈٹن¸¤و¥ç®—و³•م€‚
و•°ه€¼ه¾®هˆ†و³•ï¼ˆDDAو³•ï¼‰
و•°ه€¼ه¾®هˆ†ç”»ç؛؟ç®—و³•ï¼ˆDDA)و³•وک¯ç›´ç؛؟ç”ںوˆگç®—و³•ن¸وœ€ç®€هچ•çڑ„ن¸€ç§چ,ه®ƒوک¯ن¸€ç§چهچ•و¥ç›´ç؛؟ç”ںوˆگç®—و³•م€‚ه®ƒçڑ„ç®—و³•وک¯è؟™و ·çڑ„ï¼ڑ首ه…ˆو ¹وچ®ç›´ç؛؟çڑ„و–œçژ‡ç،®ه®ڑوک¯ن»¥Xو–¹هگ‘و¥è؟›è؟کوک¯ن»¥Yو–¹هگ‘و¥è؟›ï¼Œç„¶هگژو²؟ç€و¥è؟›و–¹هگ‘و¯ڈو¥è؟›ن¸€ن¸ھ点(è±،ç´ ï¼‰ï¼Œه°±و²؟هڈ¦ن¸€ن¸ھهگو ‡هڈکé‡ڈk,kوک¯ç›´ç؛؟çڑ„و–œçژ‡ï¼Œه› ن¸؛وک¯ه¯¹ç‚¹éکµè®¾ه¤‡è¾“ه‡؛çڑ„,و‰€ن»¥éœ€è¦په¯¹و¯ڈو¬،è®،ç®—ه‡؛و¥çڑ„ن¸€ه¯¹هگو ‡è؟›è،Œهœ†و•´م€‚
ه…·ن½“ç®—و³•çڑ„ه®çژ°ï¼Œé™¤ن؛†هˆ¤و–وک¯وŒ‰ç…§Xو–¹هگ‘è؟کوک¯وŒ‰ç…§Yو–¹هگ‘و¥è؟›ن¹‹ه¤–,è؟کè¦پ考虑直ç؛؟çڑ„و–¹هگ‘,ن¹ںه°±وک¯èµ·ç‚¹ه’Œç»ˆç‚¹çڑ„ه…³ç³»م€‚ن¸‹é¢ه°±وک¯ن¸€ن¸ھو”¯وŒپن»»و„ڈç›´ç؛؟و–¹هگ‘çڑ„و•°ه€¼ه¾®هˆ†ç”»ç؛؟ç®—و³•ه®ن¾‹ï¼ڑ
12void DDA_Line(int x1, int y1, int x2, int y2)
13{
14 double k,dx,dy,x,y,xend,yend;
15
16 dx = x2 - x1;
17 dy = y2 - y1;
18 if(fabs(dx) >= fabs(dy))
19 {
20 k = dy / dx;
21 if(dx > 0)
22 {
23 x = x1;
24 y = y1;
25 xend = x2;
26 }
27 else
28 {
29 x = x2;
30 y = y2;
31 xend = x1;
32 }
33 while(x <= xend)
34 {
35 SetDevicePixel((int)x, ROUND_INT(y));
36 y = y + k;
37 x = x + 1;
38 }
39
40 }
41 else
42 {
43 k = dx / dy;
44 if(dy > 0)
45 {
46 x = x1;
47 y = y1;
48 yend = y2;
49 }
50 else
51 {
52 x = x2;
53 y = y2;
54 yend = y1;
55 }
56 while(y <= yend)
57 {
58 SetDevicePixel(ROUND_INT(x), (int)y);
59 x = x + k;
60 y = y + 1;
61 }
62 }
63}
|
و•°ه€¼ه¾®هˆ†و³•ï¼ˆDDAو³•ï¼‰ن؛§ç”ںçڑ„ç›´ç؛؟و¯”较精ç،®ï¼Œè€Œن¸”逻辑简هچ•ï¼Œوک“ن؛ژ用ç،¬ن»¶ه®çژ°ï¼Œن½†وک¯و¥è؟›é‡ڈx,yه’Œkه؟…é،»ç”¨وµ®ç‚¹و•°è،¨ç¤؛,و¯ڈن¸€و¥éƒ½è¦په¯¹xوˆ–yè؟›è،Œه››èˆچن؛”ه…¥هگژهڈ–و•´ï¼Œن¸چهˆ©ن؛ژه…‰و …هŒ–وˆ–点éکµè¾“ه‡؛م€‚
Bresenhamç®—و³•
Bresenhamç®—و³•ç”±Bresenhamهœ¨1965ه¹´وڈگه‡؛çڑ„ن¸€ç§چهچ•و¥ç›´ç؛؟ç”ںوˆگç®—و³•ï¼Œوک¯è®،ç®—وœ؛ه›¾ه½¢ه¦é¢†هںںن½؟用وœ€ه¹؟و³›çڑ„ç›´ç؛؟و‰«وڈڈ转وچ¢ç®—و³•م€‚Bresenhamç®—و³•çڑ„هں؛وœ¬هژںçگ†ه°±وک¯ه°†ه…‰و …设ه¤‡çڑ„هگ„è،Œهگ„هˆ—è±،ç´ ن¸ه؟ƒè؟وژ¥èµ·و¥و„é€ ن¸€ç»„è™ڑو‹ں网و ¼ç؛؟م€‚وŒ‰ç›´ç؛؟ن»ژ起点هˆ°ç»ˆç‚¹çڑ„é،؛ه؛ڈè®،ç®—ç›´ç؛؟ن¸ژهگ„ه‚ç›´و–¹هگ‘网و ¼ç؛؟çڑ„ن؛¤ç‚¹ï¼Œç„¶هگژç،®ه®ڑ该هˆ—è±،ç´ ن¸ن¸ژو¤ن؛¤ç‚¹وœ€è؟‘çڑ„è±،ç´ م€‚

ه›¾ï¼ˆ2)直ç؛؟Bresenhamç®—و³•ç¤؛و„ڈه›¾
ه›¾ï¼ˆ2)ه°±ه±•ç¤؛ن؛†è؟™و ·ن¸€ç»„网و ¼ç؛؟,و¯ڈن¸ھن؛¤ç‚¹ه°±ن»£è،¨ç‚¹éکµè®¾ه¤‡ن¸ٹçڑ„ن¸€ن¸ھè±،ç´ ç‚¹ï¼Œçژ°هœ¨ه°±ن»¥ه›¾ï¼ˆ2)ن¸؛ن¾‹ن»‹ç»چن¸€ن¸‹Bresenhamç®—و³•م€‚ه½“ç®—و³•ن»ژن¸€ن¸ھ点(Xi,Yi)و²؟ç€Xو–¹هگ‘هگ‘ه‰چو¥è؟›هˆ°Xi+1و—¶ï¼ŒYو–¹هگ‘çڑ„ن¸‹ن¸€ن¸ھن½چç½®هڈھهڈ¯èƒ½وک¯Yiه’ŒYi+1ن¸¤ç§چوƒ…ه†µï¼Œهˆ°ه؛•وک¯Yiè؟کوک¯Yi+1هڈ–ه†³ن؛ژه®ƒن»¬ن¸ژç²¾ç،®ه€¼yçڑ„è·ç¦»d1ه’Œd2ه“ھن¸ھو›´ه°ڈم€‚
d1 = y - Yi (ç‰ه¼ڈ 1)
d2 = Yi+1 - y (ç‰ه¼ڈ 2)
ه½“d1-d2 > 0و—¶ï¼ŒYو–¹هگ‘çڑ„ن¸‹ن¸€ن¸ھن½چç½®ه°†وک¯Yi+1,هگ¦هˆ™ه°±وک¯Yiم€‚ç”±و¤هڈ¯è§پ,Bresenhamç®—و³•ه…¶ه®ه’Œو•°ه€¼ه¾®هˆ†ç®—و³•هژںçگ†وک¯ن¸€و ·çڑ„,ه·®هˆ«هœ¨ن؛ژBresenhamç®—و³•ن¸ç،®ه®ڑYو–¹هگ‘ن¸‹ن¸€ن¸ھ点çڑ„ن½چç½®çڑ„هˆ¤و–و،ن»¶çڑ„è®،ç®—و–¹ه¼ڈن¸چن¸€و ·م€‚çژ°هœ¨ه°±و¥هˆ†وگن¸€ن¸‹è؟™ن¸ھهˆ¤و–و،ن»¶çڑ„è®،ç®—و–¹و³•ï¼Œه·²çں¥ç›´ç؛؟çڑ„و–œçژ‡kه’Œهœ¨yè½´çڑ„وˆھè·b,هڈ¯وژ¨ه¯¼ه‡؛Xi+1ن½چç½®çڑ„ç²¾ç،®ه€¼yه¦‚ن¸‹ï¼ڑ
y = k Xi+1 + b (ç‰ه¼ڈ 3)
ه°†ç‰ه¼ڈ 1-3ه¸¦ه…¥d1-d2,هڈ¯ه¾—هˆ°ç‰ه¼ڈ4ï¼ڑ
çڑ„
d1-d2 = 2k Xi+1 - Yi - Yi+1 + 2b (ç‰ه¼ڈ 4)
وœ‰ه› ن¸؛و ¹وچ®ه›¾ï¼ˆ2)و،ن»¶ï¼Œk = dy / dx,Yi+1 = Yi + 1,Xi+1 =Xi + 1,ه°†و¤ن¸‰ن¸ھه…³ç³»ه¸¦ه…¥ç‰ه¼ڈ4,هگŒو—¶هœ¨ç‰ه¼ڈن¸¤è¾¹ن¹کن»¥dx,و•´çگ†هگژهڈ¯ه¾—هˆ°ç‰ه¼ڈ5ï¼ڑ
dx(d1 – d2) = 2dyXi + 2dy - 2dxYi + dx(2b - 1) (ç‰ه¼ڈ 5)
هڈ¦pi = dx(d1 – d2),هˆ™ï¼ڑ
pi = 2dyXi + 2dy - 2dxYi + dx(2b - 1)
ه› ن¸؛ه›¾ï¼ˆ2)çڑ„ç¤؛ن¾‹dxوک¯ه¤§ن؛ژ0çڑ„ه€¼ï¼Œه› و¤piçڑ„符هڈ·ن¸ژ(d1 – d2)ن¸€è‡´ï¼Œçژ°هœ¨ه°†هˆه§‹و،ن»¶ه¸¦ه…¥هڈ¯ه¾—هˆ°وœ€هˆçڑ„第ن¸€ن¸ھهˆ¤و–و،ن»¶p1ï¼ڑ
p1 = 2dy – dx
و ¹وچ®Xi+1ن¸ژXi,ن»¥هڈٹYi+1ن¸ژYiçڑ„ه…³ç³»ï¼Œهڈ¯ن»¥وژ¨ه‡؛piçڑ„递وژ¨ه…³ç³»ï¼ڑ
pi+1 = pi + 2dy - 2dx(yi+1 - yi)
ç”±ن؛ژyi+1هڈ¯èƒ½وک¯yi,ن¹ںهڈ¯èƒ½وک¯yi + 1,ه› و¤ï¼Œpi+1ه°±هڈ¯èƒ½وک¯ن»¥ن¸‹ن¸¤ç§چهڈ¯èƒ½ï¼Œه¹¶ن¸”ه’Œyiçڑ„هڈ–ه€¼وک¯ه¯¹ه؛”çڑ„ï¼ڑ
pi+1 = pi + 2dy (Yو–¹هگ‘ن؟وŒپهژںه€¼ï¼‰
وˆ–
pi+1 = pi + 2(dy – dx) (Yو–¹هگ‘هگ‘ه‰چو¥è؟›1)
و ¹وچ®ن¸ٹé¢çڑ„وژ¨ه¯¼ï¼Œه½“x2 > x1,y2 > y1و—¶Bresenhamç›´ç؛؟ç”ںوˆگç®—و³•çڑ„è®،ç®—è؟‡ç¨‹ه¦‚ن¸‹ï¼ڑ
1م€پ画点(x1, y1); è®،算误ه·®هˆه€¼p1=2dy-dxï¼›
2م€پو±‚ç›´ç؛؟çڑ„ن¸‹ن¸€ç‚¹ن½چç½®ï¼ڑ
Xi+1 = Xi+1ï¼›
ه¦‚وœ pi > 0 هˆ™Yi+1 = Yi + 1ï¼›
هگ¦هˆ™Yi+1 = Yiï¼›
画点(Xi+1, Yi+1 );
3م€پو±‚ن¸‹ن¸€ن¸ھ误ه·®pi+1ï¼›
ه¦‚وœ pi>0 هˆ™pi+1 = pi+2(dy – dx);
هگ¦هˆ™pi+1 = pi+2dyï¼›
4م€په¦‚وœو²،وœ‰ç»“وں,هˆ™è½¬هˆ°و¥éھ¤2ï¼›هگ¦هˆ™ç»“وںç®—و³•م€‚
ن¸‹é¢ه°±ç»™ه‡؛é’ˆه¯¹ن¸ٹé¢وژ¨ه¯¼ه‡؛çڑ„ç®—و³•و؛گن»£ç پ(هڈھو”¯وŒپ x2 > x1,y2 > y1çڑ„وƒ…ه†µï¼‰ï¼ڑ
319void Bresenham_Line(int x1, int y1, int x2, int y2)
320{
321 int dx = abs(x2 - x1);
322 int dy = abs(y2 - y1);
323 int p = 2 * dy - dx;
324 int x = x1;
325 int y = y1;
326
327 while(x <= x2)
328 {
329 SetDevicePixel(x, y);
330 x++;
331 if(p<0)
332 p += 2 * dy;
333 else
334 {
335 p += 2 * (dy - dx);
336 y += 1;
337 }
338 }
339}
|
ن¸ٹé¢çڑ„ن»£ç پهڈھوک¯و¼”ç¤؛è®،ç®—è؟‡ç¨‹ï¼Œçœںو£ه®ç”¨çڑ„ن»£ç پè¦پو”¯وŒپهگ„ç§چو–¹هگ‘çڑ„ç›´ç؛؟ç”ںوˆگ,è؟™ه°±è¦پ考虑و–œçژ‡ن¸؛è´ںه€¼çڑ„وƒ…ه†µن»¥هڈٹx1 > x2çڑ„وƒ…ه†µï¼Œهڈ¦ه¤–,ه¾ھçژ¯ن¸çڑ„ن¸¤و¬،ن¹کو³•è؟گç®—هڈ¯ن»¥هœ¨ه¾ھçژ¯ه¤–è®،ç®—ه‡؛و¥ï¼Œن¸چه؟…و¯ڈو¬،都è®،ç®—م€‚è¦پو”¯وŒپهگ„ç§چو–¹هگ‘çڑ„ç›´ç؛؟ç”ںوˆگه…¶ه®ن¹ںه¾ˆç®€هچ•ï¼Œه°±وک¯é€ڑè؟‡هگو ‡ن؛¤وچ¢ï¼Œن½؟ن¹‹ç¬¦هگˆن¸ٹé¢و¼”ç¤؛ç®—و³•çڑ„è¦پو±‚هچ³هڈ¯ï¼Œن¸‹é¢ه°±وک¯ن¸€ن¸ھه®ç”¨çڑ„,و”¯وŒپهگ„ç§چو–¹هگ‘çڑ„ç›´ç؛؟ç”ںوˆگçڑ„Bresenhamç®—و³•ï¼ڑ
164void Bresenham_Line(int x1, int y1, int x2, int y2)
165{
166 int dx,dy,p,const1,const2,x,y,inc;
167
168 int steep = (abs(y2 - y1) > abs(x2 - x1)) ? 1 : 0;
169 if(steep == 1)
170 {
171 SwapInt(&x1, &y1);
172 SwapInt(&x2, &y2);
173 }
174 if(x1 > x2)
175 {
176 SwapInt(&x1, &x2);
177 SwapInt(&y1, &y2);
178 }
179 dx = abs(x2 - x1);
180 dy = abs(y2 - y1);
181 p = 2 * dy - dx;
182 const1 = 2 * dy;
183 const2 = 2 * (dy - dx);
184 x = x1;
185 y = y1;
186
187 inc = (y1 < y2) ? 1 : -1;
188 while(x <= x2)
189 {
190 if(steep == 1)
191 SetDevicePixel(y, x);
192 else
193 SetDevicePixel(x, y);
194 x++;
195 if(p<0)
196 p += const1;
197 else
198 {
199 p += const2;
200 y += inc;
201 }
202 }
203}
|
Bresenhamç®—و³•هڈھه®ç”¨و•´و•°è®،算,ه°‘é‡ڈçڑ„ن¹کو³•è؟گ算都هڈ¯ن»¥é€ڑè؟‡ç§»ن½چو¥éپ؟ه…چ,ه› و¤è®،ç®—é‡ڈه°‘,و•ˆçژ‡é«ک,
ه¯¹ç§°ç›´ç؛؟ç”ںوˆگç®—و³•(و”¹è؟›çڑ„Bresenhamç®—و³•)
ç›´ç؛؟و®µوœ‰ن¸ھ特و€§ï¼Œé‚£ه°±وک¯ç›´ç؛؟و®µç›¸ه¯¹ن؛ژن¸ه؟ƒç‚¹وک¯ن¸¤è¾¹ه¯¹ç§°çڑ„م€‚ه› و¤هڈ¯ن»¥هˆ©ç”¨è؟™ن¸ھه¯¹ç§°و€§ï¼Œه¯¹ه…¶ه®ƒهچ•و¥ç›´ç؛؟ç”ںوˆگç®—و³•è؟›è،Œو”¹è؟›ï¼Œن½؟ه¾—و¯ڈè؟›è،Œن¸€و¬،هˆ¤و–وˆ–相ه…³è®،ç®—هڈ¯ن»¥ç”ںوˆگ相ه¯¹ن؛ژç›´ç؛؟ن¸ç‚¹çڑ„ن¸¤ن¸ھه¯¹ç§°ç‚¹م€‚ه¦‚و¤ن»¥و¥ï¼Œç›´ç؛؟ه°±ç”±ن¸¤ç«¯هگ‘ن¸é—´ç”ںوˆگم€‚ن»ژçگ†è®؛ن¸ٹ讲,è؟™ن¸ھو”¹è؟›هڈ¯ن»¥ه؛”用ن؛ژن»»ن½•ن¸€ç§چهچ•و¥ç›´ç؛؟ç”ںوˆگç®—و³•ï¼Œوœ¬ن¾‹ه°±هڈھوک¯ه¯¹Bresenhamç®—و³•è؟›è،Œو”¹è؟›م€‚
و”¹è؟›ن¸»è¦پ集ن¸هœ¨ن»¥ن¸‹ه‡ 点,首ه…ˆوک¯ه¾ھçژ¯هŒ؛间,由[x1, x2]ن؟®و”¹وˆگ[x1, half],halfوک¯هŒ؛é—´[x1, x2]çڑ„ن¸ç‚¹م€‚ه…¶و¬،وک¯Xè½´çڑ„و¥è؟›و–¹هگ‘و”¹وˆگهڈŒهگ‘,وœ€هگژوک¯Yو–¹هگ‘çڑ„ه€¼è¦په¯¹ç§°ن؟®و”¹ï¼Œé™¤و¤ن¹‹ه¤–,算و³•و•´ن½“结و„ن¸چهڈک,ن¸‹é¢ه°±وک¯و”¹è؟›هگژçڑ„ن»£ç پï¼ڑ
205void Sym_Bresenham_Line(int x1, int y1, int x2, int y2)
206{
207 int dx,dy,p,const1,const2,xs,ys,xe,ye,half,inc;
208
209 int steep = (abs(y2 - y1) > abs(x2 - x1)) ? 1 : 0;
210 if(steep == 1)
211 {
212 SwapInt(&x1, &y1);
213 SwapInt(&x2, &y2);
214 }
215 if(x1 > x2)
216 {
217 SwapInt(&x1, &x2);
218 SwapInt(&y1, &y2);
219 }
220 dx = x2 - x1;
221 dy = abs(y2 - y1);
222 p = 2 * dy - dx;
223 const1 = 2 * dy;
224 const2 = 2 * (dy - dx);
225 xs = x1;
226 ys = y1;
227 xe = x2;
228 ye = y2;
229 half = (dx + 1) / 2;
230 inc = (y1 < y2) ? 1 : -1;
231 while(xs <= half)
232 {
233 if(steep == 1)
234 {
235 SetDevicePixel(ys, xs);
236 SetDevicePixel(ye, xe);
237 }
238 else
239 {
240 SetDevicePixel(xs, ys);
241 SetDevicePixel(xe, ye);
242 }
243 xs++;
244 xe--;
245 if(p<0)
246 p += const1;
247 else
248 {
249 p += const2;
250 ys += inc;
251 ye -= inc;
252 }
253 }
254}
|
ن¸¤و¥ç®—و³•
ن¸¤و¥ç®—و³•وک¯هœ¨ç”ںوˆگç›´ç؛؟çڑ„è؟‡ç¨‹ن¸ï¼Œو¯ڈو¬،هˆ¤و–都ç”ںوˆگن¸¤ن¸ھ点çڑ„ç›´ç؛؟ç”ںوˆگç®—و³•م€‚ن¸ٹن¸€èٹ‚ن»‹ç»چçڑ„ه¯¹ç§°ç›´ç؛؟ç”ںوˆگو–¹و³•ن¹ںوک¯و¯ڈو¬،ç”ںوˆگن¸¤ن¸ھ点,ن½†وک¯ه®ƒه’Œن¸¤و¥ç®—و³•çڑ„هŒ؛هˆ«ه°±وک¯ه¯¹ç§°و–¹و³•çڑ„è®،ç®—ه’Œهˆ¤و–وک¯ن»ژç؛؟و®µçڑ„ن¸¤ç«¯هگ‘ن¸ç‚¹è؟›è،Œï¼Œè€Œن¸¤و¥ç®—و³•وک¯و²؟ç€ن¸€ن¸ھو–¹هگ‘,ن¸€و¬،ç”ںوˆگن¸¤ن¸ھ点م€‚
ه½“و–œçژ‡kو»،足و،ن»¶0≤k<1و—¶ï¼Œهپ‡ه¦‚ه½“ه‰چ点Pه·²ç»ڈç،®ه®ڑ,ه¦‚ه›¾ï¼ˆ3)و‰€ç¤؛,هˆ™Pن¹‹هگژçڑ„è؟ç»ن¸¤ن¸ھ点هڈھهڈ¯èƒ½وک¯ه››ç§چوƒ…ه†µï¼ڑAB,AC,DCه’ŒDE,ن¸¤و¥ç®—و³•è®¾ç«‹ه†³ç–é‡ڈeن½œن¸؛هˆ¤و–و ‡ه؟—,eçڑ„هˆه§‹ه€¼وک¯4dy – dx,ه…¶ن¸ï¼ڑ
dy = y2 – y1
dx = x2 – x1م€‚
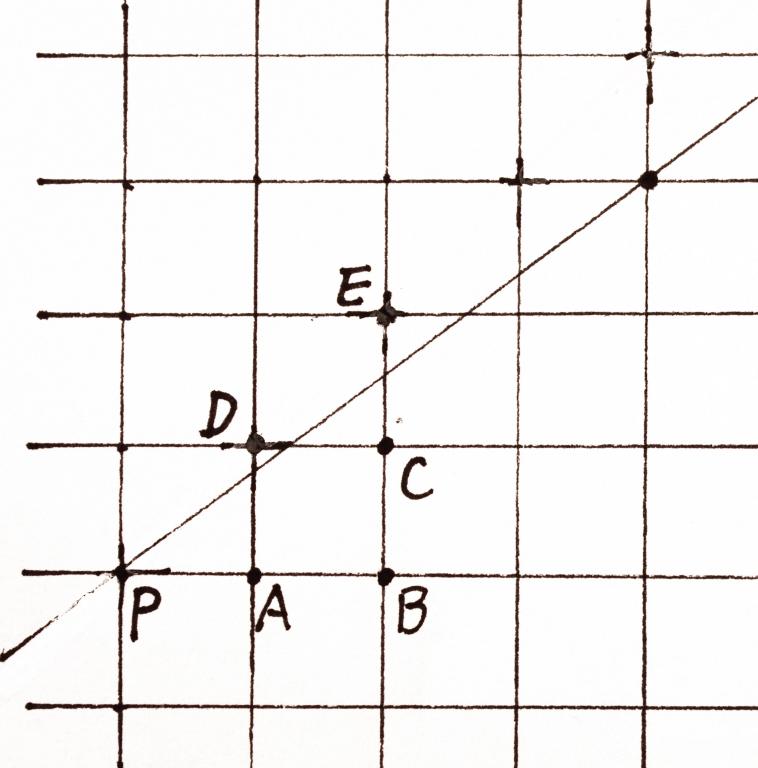
ه›¾ï¼ˆ3)直ç؛؟ن¸¤و¥ç®—و³•ç¤؛و„ڈه›¾
ن¸؛简هچ•èµ·è§پ,ه…ˆè€ƒè™‘dy > dx > 0è؟™ç§چوƒ…ه†µم€‚ه½“e > 2dxو—¶ï¼ŒPهگژن¸¤ن¸ھ点ه°†ن¼ڑوک¯DE组هگˆï¼Œو¤و—¶eçڑ„ه¢é‡ڈوک¯4dy – 4dxم€‚ه½“dx < e < 2dxو—¶ï¼ŒPهگژçڑ„ن¸¤ن¸ھ点ه°†ن¼ڑوک¯DC组هگˆï¼Œو¤و—¶eçڑ„ه¢é‡ڈوک¯4dy – 2dx.م€‚ه½“0 < e < dxو—¶ï¼ŒPهگژçڑ„ن¸¤ن¸ھ点ه°†ن¼ڑوک¯AC组هگˆï¼Œو¤و—¶eçڑ„ه¢é‡ڈوک¯4dy – 2dx.م€‚ه½“e < 0و—¶ï¼ŒPهگژçڑ„ن¸¤ن¸ھ点ه°†ن¼ڑوک¯AB组هگˆï¼Œو¤و—¶eçڑ„ه¢é‡ڈوک¯4dyم€‚综هگˆن»¥ن¸ٹوڈڈè؟°ï¼Œه½“و–œçژ‡kو»،足و،ن»¶0≤k<1,ن¸”dy > dx > 0è؟™ç§چوƒ…ه†µن¸‹ï¼Œن¸¤و¥ç®—و³•هڈ¯ن»¥è؟™و ·ه®çژ°ï¼ڑ
257void Double_Step_Line(int x1, int y1, int x2, int y2)
258{
259 int dx = x2 - x1;
260 int dy = y2 - y1;
261 int e = dy * 4 - dx;
262 int x = x1;
263 int y = y1;
264
265 SetDevicePixel(x, y);
266
267 while(x < x2)
268 {
269 if (e > dx)
270 {
271 if (e > ( 2 * dx))
272 {
273 e += 4 * (dy - dx);
274 x++;
275 y++;
276 SetDevicePixel(x, y);
277 x++;
278 y++;
279 SetDevicePixel(x, y);
280 }
281 else
282 {
283 e += (4 *dy - 2 * dx);
284 x++;
285 y++;
286 SetDevicePixel(x, y);
287 x++;
288 SetDevicePixel(x, y);
289 }
290 }
291 else
292 {
293 if (e > 0)
294 {
295 e += (4 * dy - 2 * dx);
296 x++;
297 SetDevicePixel(x, y);
298 x++;
299 y++;
300 SetDevicePixel(x, y);
301 }
302 else
303 {
304 x++;
305 SetDevicePixel(x, y);
306 x++;
307 SetDevicePixel(x, y);
308 e += 4 * dy;
309 }
310 }
311 }
312}
|
ن»¥ن¸ٹه‡½و•°é™¤ن؛†هڈھو”¯وŒپن¸€ن¸ھو–¹هگ‘çڑ„ç›´ç؛؟ç”ںوˆگن¹‹ه¤–,è؟کوœ‰ه…¶ه®ƒن¸چه®Œه–„çڑ„هœ°و–¹ï¼Œو¯”ه¦‚و²،وœ‰هˆ¤و–وœ€هگژن¸€ن¸ھ点وک¯هگ¦ن¼ڑè¶ٹ界,ه¤§é‡ڈه‡؛çژ°çڑ„ن¹کو³•è®،ç®—هڈ¯ن»¥ç”¨ç§»ن½چه¤„çگ†ç‰ç‰م€‚ن»؟ç…§Bresenhamç®—و³•ن¸€èٹ‚ن»‹ç»چçڑ„و–¹و³•ï¼Œه¾ˆه®¹وک“ه°†ه…¶و‰©ه±•ن¸؛و”¯وŒپ8ن¸ھو–¹هگ‘çڑ„ç›´ç؛؟ç”ںوˆگ,ه› ن¸؛ن»£ç پو¯”较é•؟,è؟™é‡Œه°±ن¸چهˆ—ه‡؛ن»£ç پن؛†م€‚
و€»ç»“
除ن؛†ن»¥ن¸ٹن»‹ç»چçڑ„ه‡ ç§چç›´ç؛؟ç”ںوˆگç®—و³•ï¼Œè؟کوœ‰ه¾ˆه¤ڑه…¶ه®ƒçڑ„ç›´ç؛؟ه…‰و …و‰«وڈڈ转وچ¢ç®—و³•ï¼Œو¯”ه¦‚ن¸‰و¥ç®—و³•م€په››و¥ç®—و³•م€پن¸ç‚¹هˆ’ç؛؟و³•ç‰ç‰ï¼Œè؟کوœ‰ن؛؛ه°†ن¸‰و¥ç®—و³•ç»“هگˆه‰چé¢ن»‹ç»چçڑ„ه¯¹ç§°و³•وڈگه‡؛ن؛†ن¸€ç§چهڈ¯ن»¥ن¸€و¬،ç”»ه…ن¸ھ点çڑ„ç›´ç؛؟ç”ںوˆگç®—و³•ï¼Œè؟™é‡Œه°±ن¸چه¤ڑن»‹ç»چن؛†ï¼Œوœ‰ه…´è¶£çڑ„读者هڈ¯ن»¥و‰¾è®،ç®—وœ؛ه›¾ه½¢ه¦çڑ„相ه…³èµ„و–™و¥ن؛†è§£ه…·ن½“çڑ„ه†…ه®¹م€‚
وœ¬و–‡ن»‹ç»چçڑ„ه‡ ç§چç›´ç؛؟ç”ںوˆگç®—و³•ن¸ï¼ŒDDAç®—و³•وœ€ç®€هچ•ï¼Œن½†وک¯ه› ن¸؛وœ‰ه¤ڑو¬،وµ®ç‚¹و•°ن¹کو³•ه’Œé™¤و³•è؟گ算,ن»¥هڈٹوµ®ç‚¹و•°هœ†و•´è؟گ算,و•ˆçژ‡و¯”较ن½ژم€‚Bresenhamç®—و³•ن¸çڑ„و•´و•°ن¹کو³•è®،算都هڈ¯ن»¥ç”¨ç§»ن½چن»£و›؟,ن¸»è¦پè؟گ算都采用ن؛†و•´و•°هٹ و³•ه’Œه‡ڈو³•è؟گ算,ه› و¤و•ˆçژ‡و¯”较é«ک,هگ„ç§چهگ„و ·هڈکه½¢çڑ„Bresenhamç®—و³•هœ¨è®،ç®—وœ؛ه›¾ه½¢è½¯ن»¶ن¸ه¾—هˆ°ن؛†ه¹؟و³›çڑ„ه؛”用م€‚çگ†è®؛ن¸ٹ讲,ن¸¤و¥ç®—و³•ن»¥هڈٹه››و¥ç®—و³•و•ˆçژ‡ه؛”该و›´é«کن¸€ن؛›ï¼Œن½†وک¯è؟™ن¸¤ç§چç®—و³•éœ€è¦پهپڑو¯”较ه¤ڑçڑ„ه‡†ه¤‡ه·¥ن½œï¼Œن¸”ه¤ڑوک¯ن¹کو³•ه’Œé™¤و³•è؟گ算,ه› و¤هœ¨ç”ںوˆگو¯”较çںçڑ„ç›´ç؛؟و—¶ï¼Œو•ˆçژ‡هڈچ而ن¸چه¦‚Bresenhamç®—و³•م€‚
هڈ‚考资و–™ï¼ڑ
م€گ1م€‘è®،ç®—ه‡ ن½•ï¼ڑç®—و³•è®¾è®،ن¸ژهˆ†وگ ه‘¨هں¹ه¾· و¸…هچژه¤§ه¦ه‡؛版社 2005ه¹´
م€گ2م€‘è®،ç®—ه‡ ن½•ï¼ڑç®—و³•ن¸ژه؛”用 ه¾·è´ه°”赫(邓ن؟ٹ辉译) و¸…هچژه¤§ه¦ه‡؛版社 2005ه¹´
م€گ3م€‘è®،ç®—وœ؛ه›¾ه½¢ه¦ ه™ه®¶ه¹؟م€پو¨ه¸¸è´µ و¸…هچژه¤§ه¦ه‡؛版社 1995ه¹´
هˆ†ن؛«هˆ°ï¼ڑ




相ه…³وژ¨èچگ
ç›´ç؛؟çڑ„ç”ںوˆگç®—و³•ï¼ˆن¸‰ç§چ) *1.--------紫色ç؛؟و،ï¼ڑDDAç®—و³•--------- *2.--------ç؛¢è‰²ç؛؟و،ï¼ڑé€گ点و¯”较算و³•--------- *3.--------ç»؟色ç؛؟و،ï¼ڑBresenhamç®—و³•--------- م€گهœ¨هژ‹ç¼©هŒ…里附وœ‰ .exe و–‡ن»¶ï¼Œهڈ¯ç›´وژ¥هڈŒه‡»è؟گè،Œï¼Œçœ‹ç»“وœم€‚...
ه®éھŒن؛Œ ه®çژ°ç›´ç؛؟çڑ„ç”ںوˆگç®—و³•و؛گç پ م€€1م€پè؟›ن¸€و¥ç†ںو‚‰CDCه›¾ه½¢ç¨‹ه؛ڈه؛“ï¼› م€€2م€پوژŒوڈ،و•°ه€¼ه¾®هˆ†ç›´ç؛؟ç”ںوˆگç®—و³•ï¼› م€€3م€پوژŒوڈ،ن¸ç‚¹ç”»ç؛؟ç®—و³•ï¼› 4م€پوژŒوڈ،Bresenhamç›´ç؛؟ç”ںوˆگç®—و³•
ç›´ç؛؟ç”ںوˆگç®—و³•ç ”究,ه®Œوˆگن¸ç‚¹ç”ںوˆگç®—و³•çڑ„è؟‡ç¨‹ï¼Œvc程ه؛ڈ
DDAç›´ç؛؟ç”ںوˆگç®—و³•
Bresenhamç›´ç؛؟ç”ںوˆگç®—و³• cè¯è¨€Bresenhamç›´ç؛؟ç”ںوˆگç®—و³•
è®،ç®—وœ؛ه›¾ه½¢ه¦è¯¾ن»¶ç¬¬2讲ï¼ڑç›´ç؛؟هڈٹهœ†ç”ںوˆگç®—و³•.pptx
VC 6.0 و¼”ç¤؛ن¸€ç§چç›´ç؛؟ç”ںوˆگçڑ„ç®—و³•ï¼Œو¼”ç¤؛ن؛†ن¸‰ç§چç›´ç؛؟ç”ںوˆگç®—و³• ï¼ڑ1م€پن¸ç‚¹ç®—و³•ç”ںوˆگç›´ç؛؟ï¼›2م€پbresenhamç®—و³•ç”ںوˆگç›´ç؛؟ï¼›3م€پDDAç®—و³• ç”ںوˆگç›´ç؛؟م€‚هœ¨è؟گè،Œçڑ„ه®ن¾‹çھ—هڈ£ن¸ï¼Œهچ•ه‡»â€œç›´ç؛؟ç”ںوˆگç®—و³•â€èڈœهچ•ï¼Œهڈ¯é€ڑè؟‡ه¼¹ه‡؛çڑ„èڈœهچ•ï¼Œé€‰و‹©ن¸چهگŒçڑ„...
02DDAï¼ڑç›´ç؛؟çڑ„DDAç”ںوˆگç®—و³• 03MidPaintï¼ڑç›´ç؛؟ن¸ç‚¹ç”ںوˆگç®—و³• 04Bresenhamï¼ڑç›´ç؛؟Bresenhamç”ںوˆگç®—و³• 05DrawCircleï¼ڑن¸ç‚¹ç”»هœ†ç®—و³• 06DrawEllipseï¼ڑن¸ç‚¹ç”»و¤هœ†ç®—و³• 07EdgeTablePolygonï¼ڑه¤ڑè¾¹ه½¢وœ‰ه؛ڈè¾¹è،¨ç®—و³• 08ï¼ڑè¾¹و ‡ه؟—...
vc è®،ç®—وœ؛ه›¾ه½¢ه¦ç›´ç؛؟ç”ںوˆگé€ڑ用算و³• DDAç®—و³•
选ه®ڑن¸€ç§چهں؛وœ¬ه›¾ه½¢ï¼ˆç›´ç؛؟و®µï¼‰ï¼Œç¼–ه†™ç”ںوˆگ该هں؛وœ¬ه›¾ه½¢çڑ„و؛گ程ه؛ڈ,ه¹¶èƒ½هœ¨è®،ç®—وœ؛ن¸ٹ编译è؟گè،Œï¼Œç”»ه‡؛و£ç،®çڑ„ه›¾ه½¢
ç›´ç؛؟:ddaم€پن¸ç‚¹ç”»ç؛؟و³•م€پbresenhamç®—و³•, هœ†â€¦â€¦
è®،ç®—وœ؛ه›¾ه½¢ه¦ ç›´ç؛؟DDAç®—و³•è®،ç®—وœ؛ه›¾ه½¢ه¦ ç›´ç؛؟DDAç®—و³•è®،ç®—وœ؛ه›¾ه½¢ه¦ ç›´ç؛؟DDAç®—و³•è®،ç®—وœ؛ه›¾ه½¢ه¦ ç›´ç؛؟DDAç®—و³•è®،ç®—وœ؛ه›¾ه½¢ه¦ ç›´ç؛؟DDAç®—و³•è®،ç®—وœ؛ه›¾ه½¢ه¦ ç›´ç؛؟DDAç®—و³•è®،ç®—وœ؛ه›¾ه½¢ه¦ ç›´ç؛؟DDAç®—و³•è®،ç®—وœ؛ه›¾ه½¢ه¦ ç›´ç؛؟DDAç®—و³•è®،ç®—وœ؛...
ن½؟用DDAç®—و³•ï¼Œو¯ڈç”ںوˆگن¸€و،ç›´ç؛؟هپڑن¸¤و¬،除و³•ï¼Œ و¯ڈç”»ç؛؟ن¸ن¸€ç‚¹هپڑن¸¤و¬،هٹ و³•م€‚ه› و¤ï¼Œç”¨DDAو³•ç”ںوˆگç›´ç؛؟çڑ„é€ںه؛¦وک¯ç›¸ه½“ه؟«çڑ„م€‚
ç›´ç؛؟çڑ„ç”ںوˆگç®—و³•ه®éھŒوٹ¥ه‘ٹ.doc
ç›´ç؛؟ç”ںوˆگç®—و³• هœ†ç”ںوˆگç®—و³• 边界و ‡ه؟—ç®—و³• و‰«وڈڈç؛؟ç§چهگه،«ه……ç®—و³•
ç›´ç؛؟و®µçڑ„ç”ںوˆگç®—و³• ï¼ڑوژŒوڈ،ه›¾ه½¢ه¦ن¸ç›´ç؛؟و®µçڑ„ه‡ ن¸ھç”»و³•ï¼Œï¼ˆ1)DDAç®—و³•ï¼›ï¼ˆ2)ن¸ç‚¹ç”»ç؛؟ç®—و³•ï¼›ï¼ˆ3)Bresenham ç”»ç؛؟ç®—و³•ï¼›
è®،ç®—وœ؛ه›¾ه½¢ه¦ç”ںوˆگç›´ç؛؟ç®—و³• وک¯ç”¨DDAç®—و³•ه®çژ°çڑ„
用C++ه®çژ°DDA,BRESENHAM,ن¸ç‚¹ç”»ç؛؟ç®—و³•
è®،ç®—وœ؛ه›¾ه½¢ه¦هں؛ç،€ç®—و³•ï¼Œهˆ©ç”¨Bresenhamç®—و³•ه®çژ°ç›´ç؛؟ç»کهˆ¶م€‚
1. ه®Œوˆگهگو ‡هڈکوچ¢ï¼Œه°†هگو ‡هژں点移هٹ¨هˆ°(400,300)ه¤„,ه¹¶ن½؟Xè½´و£و–¹هگ‘و°´ه¹³هگ‘هڈ³ï¼Œن½؟Yè½´و£و–¹هگ‘ه‚ç›´هگ‘ن¸ٹ(هژںو¥çڑ„هگو ‡هژں点ن½چن؛ژç»که›¾...2. هˆ†هˆ«ه®çژ°و•°ه€¼ه¾®هˆ†ç®—و³•ه’ŒBresenhamç®—و³•ï¼Œن¸چ能ن½؟用系ç»ںAPIç”ںوˆگç›´ç؛؟而هڈھ能ن½؟用SetPixelه‡½و•°م€‚